Assalamu'alaikum ... untuk kali ini saya akan share tentang pembuatan robot soccer. Pasti sobat sudah tahu apa itu robot soccer??? robot soccer adalah robot yang dapat bermain sepak bola. tapi robot ini tidak sehebat layaknya messi atau ronaldo, hehe...
Robot soccer adalah salah satu jenis mobile robot sederhana yang dapat bergerak sesuai perintah yang diberikan dari remote control berupa maju, mundur, belok kiri dan kanan. untuk aplikasinya dalam sepak bola digunakan untuk menggiring dan menendang bola. Robot soccer kali merupakan robot murni analog yang gerakannya dilakukan pengendali ( user ) melalui remote kontrol yang dihubungkan dengan rangkaian elektronik dari robot.
Blok diagram dari robot soccer
1. Remot adalah pengendali dari pergerakan robot baik itu maju, munduk, belok dan menendang. pada bagian remote terdiri dari 5 push button dimana setiap tombolnya merupakan perintah pergererakan robot. Pada remote langsung dihubungkan dengan baterai 9v yang notabenya sebagai sumber tegangan dan penghasil arus
2. Driver robot soccer ini menggunakan 4 buah relay. dimana 2 buah relay digunakan untuk mengontrol 1 buah motor dc
3. Motor dc merupakan output digunakan untuk berjalan dan menendang.
Berikut merupakan rangkaian dari robot soccer
Rangkaian diatas digunakan untuk mengontrol 1 buah motor dc. untuk gerakan menendang hanya push button dihubungkan langsung ke motor dc.
Berikut daftar komponen utamanya :
1. Resistor 330 ohm 4 buah
2. Relay 9v 5 pin 4 buah
3. Transitor BD139 4 buah
4. Push button 4 pin 5 buah
5. Motor dc/dvd 3 buah
6. Batterai 9v
7. 2 buah mobil-mobilan
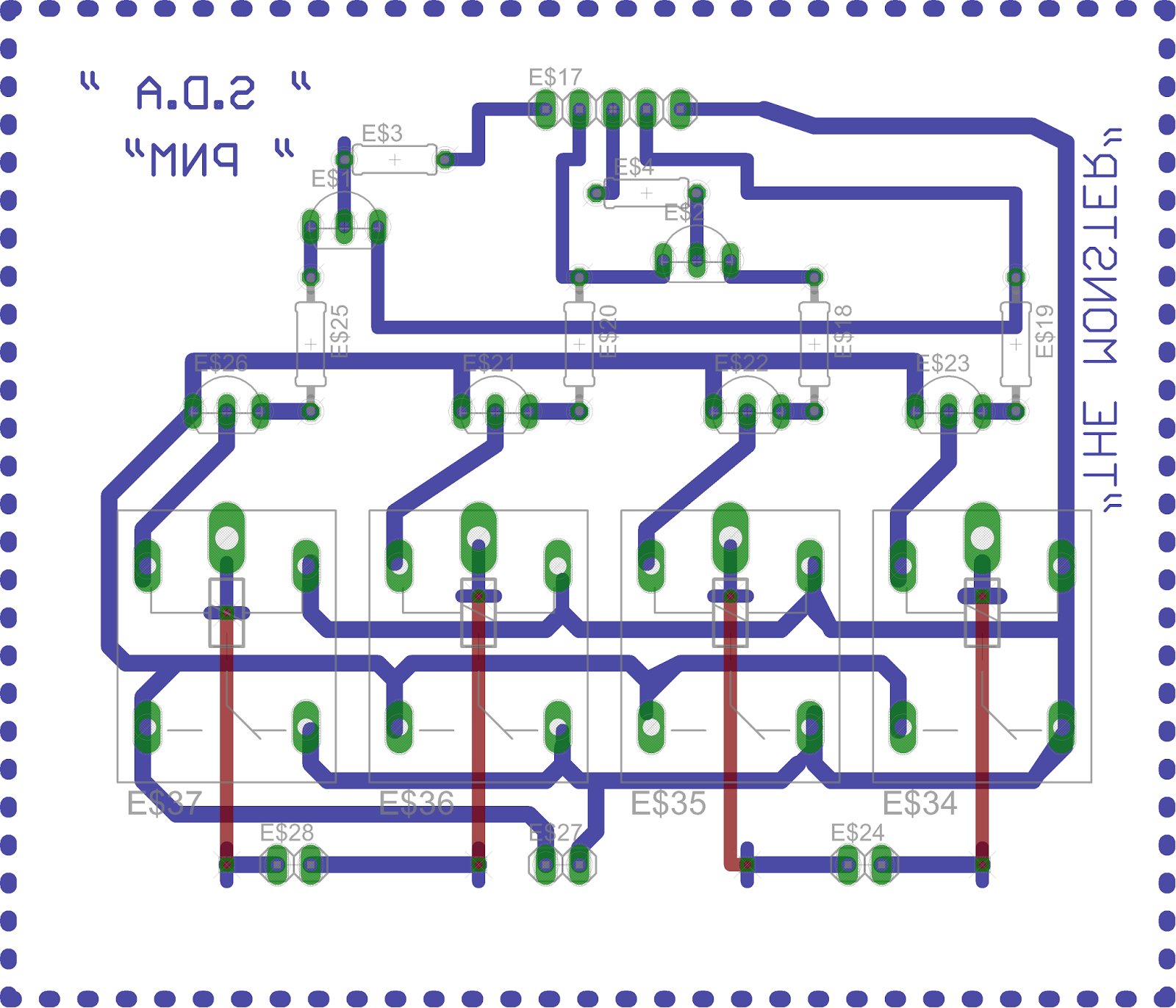
Jika sobat bingung dalam pembuatan layout PCB-nya, dibawah ini merupakan layout PCB yang dibuat menggunakan software eagle.
layout diatas merupakan rangkaian driver soccer. kabel merah diatas adalah jumper. sedangkan gambar dibawah ini merupakan layout pada rangkaian remote soccer
Bentuk robot yang sudah jadi
berikut video dari robot soccer